Dernières Brèves
 La voile solaire avancée de la NASA s’est déployée sans encombre dans l’espace26 avril 2024La NASA a lancé son système de voile solaire composite avancé (Advanced Solar Sail) à bord d'une fusée Electron de RocketLab, déployant ainsi une voile de 9 mètres en orbite terrestre basse......
La voile solaire avancée de la NASA s’est déployée sans encombre dans l’espace26 avril 2024La NASA a lancé son système de voile solaire composite avancé (Advanced Solar Sail) à bord d'une fusée Electron de RocketLab, déployant ainsi une voile de 9 mètres en orbite terrestre basse...... Des millions de joueurs du jeu vidéo Borderlands 3 font avancer la recherche biomédicale24 avril 2024Plus de 4 millions de joueurs jouant à un mini-jeu de science citoyenne dans le jeu vidéo Borderlands 3 ont aidé à reconstituer l'histoire de l'évolution microbienne des bactéries de l'intestin humain......
Des millions de joueurs du jeu vidéo Borderlands 3 font avancer la recherche biomédicale24 avril 2024Plus de 4 millions de joueurs jouant à un mini-jeu de science citoyenne dans le jeu vidéo Borderlands 3 ont aidé à reconstituer l'histoire de l'évolution microbienne des bactéries de l'intestin humain......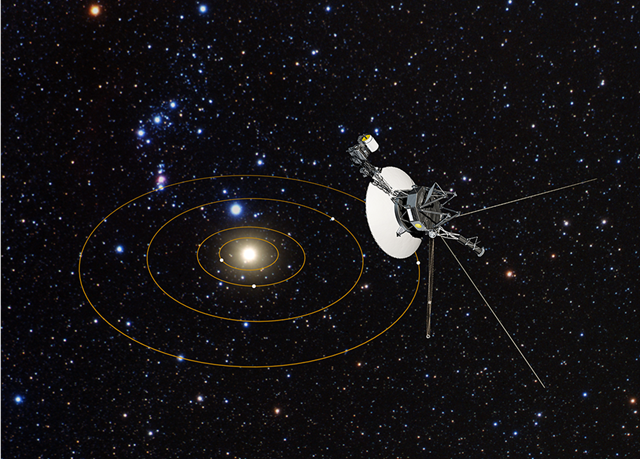 La vieille sonde Voyager 1 de la NASA rétablit la transmission de ses données après 5 mois de charabia24 avril 2024La sonde Voyager 1 a renvoyé des données exploitables pour la première fois depuis plus de 5 mois, ce qui laisse espérer que la mission, vieille de 46 ans, pourra enfin reprendre ses activités normales. La sonde interstellaire préférée de la NASA a transmis samedi au centre de contrôle de la mission des données sur la santé et l'état de ses systèmes embarqués......
La vieille sonde Voyager 1 de la NASA rétablit la transmission de ses données après 5 mois de charabia24 avril 2024La sonde Voyager 1 a renvoyé des données exploitables pour la première fois depuis plus de 5 mois, ce qui laisse espérer que la mission, vieille de 46 ans, pourra enfin reprendre ses activités normales. La sonde interstellaire préférée de la NASA a transmis samedi au centre de contrôle de la mission des données sur la santé et l'état de ses systèmes embarqués...... Photos : Lorsque deux satellites dans des directions opposées se croisent dans l’espace à 10 000 km/h13 avril 2024La sonde Lunar Reconnaissance Orbiter (LRO) de la NASA a pris une photo parfaitement synchronisée lorsqu'elle a croisé le chemin d'un autre engin spatial en orbite autour de la lune. La sonde LRO, qui est en orbite autour de la lune depuis 15 ans, a pris plusieurs images de l'orbiteur lunaire Danuri de l'Institut de recherche aérospatiale de Corée, alors que les deux engins spatiaux, voyageant sur des orbites presque parallèles, se sont croisés dans des directions opposées au cours de trois orbites entre le 5 et le 6 mars......
Photos : Lorsque deux satellites dans des directions opposées se croisent dans l’espace à 10 000 km/h13 avril 2024La sonde Lunar Reconnaissance Orbiter (LRO) de la NASA a pris une photo parfaitement synchronisée lorsqu'elle a croisé le chemin d'un autre engin spatial en orbite autour de la lune. La sonde LRO, qui est en orbite autour de la lune depuis 15 ans, a pris plusieurs images de l'orbiteur lunaire Danuri de l'Institut de recherche aérospatiale de Corée, alors que les deux engins spatiaux, voyageant sur des orbites presque parallèles, se sont croisés dans des directions opposées au cours de trois orbites entre le 5 et le 6 mars......
Ceci n’est pas une méduse…

C’est un robot mou de 5 mm de diamètre, inspiré d’une larve de méduse (scyphomedusae ephyra) qui trace sa route à toute allure.
Bien qu’il ne mesure que quelques millimètres, il peut déplacer l’eau qui circule autour de son corps pour accomplir une série de tâches, telles que de transporter sélectivement des billes de différentes tailles pour imiter la capture de nourriture (image ci-dessous), se recroqueviller pour échapper aux « prédateurs », mélanger différents fluides et générer une trajectoire chimique dans son sillage.
(Ziyu Ren et coll./ Max Planck Institute for Intelligent Systems)

C’est le travail de Metin Sitti et de ses collègues de l’Institut Max Planck pour les systèmes intelligents à Stuttgart (Max Planck Institute for Intelligent Systems), en Allemagne. Ils l’ont créé en connectant un noyau magnétique en élastomère composite à huit clapets (volets) pliables. Lorsqu’un champ magnétique oscillant est appliqué, les clapets se contractent et se redressent comme une méduse qui nage.
La recherche vise, entre autres, à le développer pour des applications médicales telles que les traitements anticancéreux mini-invasifs. Les auteurs suggèrent que leur conception pourrait également servir de système modèle pour aider à comprendre comment les changements dans l’environnement influent sur la survie des méduses éphyra (une étape du cycle de vie de la méduse).
L’étude publiée dans Nature Communications : Multi-functional soft-bodied jellyfish-like swimming et présentée sur le site du Max Planck Institute for Intelligent Systems : Jellyfish-inspired robot wins Best Paper Award in prestigious robotics conference.
[totaldonations_circle_bar id="81539"]
Il n'y a pas de publicité ici et le Guru tente, cette semaine, de réunir les fonds nécessaires pour continuer à faire vivre GuruMeditation. On y est presque et votre aide est absolument nécessaire et cela se passe ici.
Derniers Articles
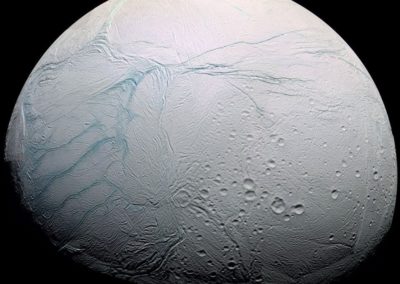 Les “rayures de tigre” de la lune de Saturne, Encelade, sont liées à ses spectaculaires geysers2 mai 2024Les mouvements des lignes de faille de la croûte gelée d'Encelade, une des lunes de Saturne, pourraient être à l'origine des panaches de matière glacée qui s'échappent du ventre aqueux de la lune, selon une équipe de chercheurs qui a récemment modélisé ces mouvements. L'étude de l'équipe s'est concentrée sur les “rayures de tigre” d'Encelade, de longues fissures situées principalement dans les parties méridionales de la lune, que certains pensent avoir été causées par un ancien impact. D'autres chercheurs ont......
Les “rayures de tigre” de la lune de Saturne, Encelade, sont liées à ses spectaculaires geysers2 mai 2024Les mouvements des lignes de faille de la croûte gelée d'Encelade, une des lunes de Saturne, pourraient être à l'origine des panaches de matière glacée qui s'échappent du ventre aqueux de la lune, selon une équipe de chercheurs qui a récemment modélisé ces mouvements. L'étude de l'équipe s'est concentrée sur les “rayures de tigre” d'Encelade, de longues fissures situées principalement dans les parties méridionales de la lune, que certains pensent avoir été causées par un ancien impact. D'autres chercheurs ont...... Plus de 90 % des oiseaux polaires sont contaminés par des microplastiques2 mai 2024Le plastique est pratiquement partout sur Terre. De la plus haute montagne aux plus grandes profondeurs des océans, des régions polaires à l'intérieur de notre corps, il n'y a plus moyen d'y échapper. Bien que la pollution plastique soit loin d'être un nouveau problème, l'ampleur de la pollution par les microplastiques n'est apparue que récemment. La pollution plastique est généralement divisée en macroplastiques (>5 cm), microplastiques (0,1 µm-5 mm) et nanoplastiques (<0,1 µm). Plus le plastique est......
Plus de 90 % des oiseaux polaires sont contaminés par des microplastiques2 mai 2024Le plastique est pratiquement partout sur Terre. De la plus haute montagne aux plus grandes profondeurs des océans, des régions polaires à l'intérieur de notre corps, il n'y a plus moyen d'y échapper. Bien que la pollution plastique soit loin d'être un nouveau problème, l'ampleur de la pollution par les microplastiques n'est apparue que récemment. La pollution plastique est généralement divisée en macroplastiques (>5 cm), microplastiques (0,1 µm-5 mm) et nanoplastiques (<0,1 µm). Plus le plastique est...... Des scientifiques trouvent un moyen de convertir les groupes sanguins et de les rendre mutuellement compatibles pour la transfusion2 mai 2024Les transfusions sanguines sauvent souvent la vie des patients qui ont désespérément besoin de remplacer leur sang perdu à la suite d'une intervention chirurgicale ou d'une blessure. Le problème est que les réserves de sang sont faibles dans le monde entier. Pour ne rien arranger, il existe plusieurs groupes sanguins, dont certains sont incompatibles. Par exemple, si votre groupe sanguin est O négatif, vous ne pouvez recevoir que du sang de type O négatif......
Des scientifiques trouvent un moyen de convertir les groupes sanguins et de les rendre mutuellement compatibles pour la transfusion2 mai 2024Les transfusions sanguines sauvent souvent la vie des patients qui ont désespérément besoin de remplacer leur sang perdu à la suite d'une intervention chirurgicale ou d'une blessure. Le problème est que les réserves de sang sont faibles dans le monde entier. Pour ne rien arranger, il existe plusieurs groupes sanguins, dont certains sont incompatibles. Par exemple, si votre groupe sanguin est O négatif, vous ne pouvez recevoir que du sang de type O négatif...... Le télescope spatial James Webb capture les meilleures images de la nébuleuse de la tête de cheval2 mai 2024L'une des plus célèbres structures du ciel terrestre vient d'être révélée sous un jour tout à fait nouveau. Les observations dans l'infrarouge moyen et proche du télescope spatial James Webb (JWST/ Webb) ont mis en évidence des caractéristiques inédites dans le nuage spatial connu sous le nom de nébuleuse de la tête de cheval. Dans une image d'une précision époustouflante, le télescope spatial se concentre sur la région située au sommet de la tête du “cheval”, capturant des vrilles et des filaments......
Le télescope spatial James Webb capture les meilleures images de la nébuleuse de la tête de cheval2 mai 2024L'une des plus célèbres structures du ciel terrestre vient d'être révélée sous un jour tout à fait nouveau. Les observations dans l'infrarouge moyen et proche du télescope spatial James Webb (JWST/ Webb) ont mis en évidence des caractéristiques inédites dans le nuage spatial connu sous le nom de nébuleuse de la tête de cheval. Dans une image d'une précision époustouflante, le télescope spatial se concentre sur la région située au sommet de la tête du “cheval”, capturant des vrilles et des filaments......