Dernières Brèves
 Le plus haut observatoire du monde entre en fonction au Chili2 mai 2024Pour le Livre Guinness des records, l'Observatoire d'Atacama de l'Université de Tokyo (TAO) est l'observatoire astronomique le plus haut du monde. Le TAO se trouve à une altitude de 5 640 mètres au sommet d'une montagne dans le désert d'Atacama, au nord du Chili. Le télescope de 6,5 m optimisé pour les infrarouges est enfin opérationnel après 26 ans de planification et de construction......
Le plus haut observatoire du monde entre en fonction au Chili2 mai 2024Pour le Livre Guinness des records, l'Observatoire d'Atacama de l'Université de Tokyo (TAO) est l'observatoire astronomique le plus haut du monde. Le TAO se trouve à une altitude de 5 640 mètres au sommet d'une montagne dans le désert d'Atacama, au nord du Chili. Le télescope de 6,5 m optimisé pour les infrarouges est enfin opérationnel après 26 ans de planification et de construction...... La voile solaire avancée de la NASA s’est déployée sans encombre dans l’espace26 avril 2024La NASA a lancé son système de voile solaire composite avancé (Advanced Solar Sail) à bord d'une fusée Electron de RocketLab, déployant ainsi une voile de 9 mètres en orbite terrestre basse......
La voile solaire avancée de la NASA s’est déployée sans encombre dans l’espace26 avril 2024La NASA a lancé son système de voile solaire composite avancé (Advanced Solar Sail) à bord d'une fusée Electron de RocketLab, déployant ainsi une voile de 9 mètres en orbite terrestre basse...... Des millions de joueurs du jeu vidéo Borderlands 3 font avancer la recherche biomédicale24 avril 2024Plus de 4 millions de joueurs jouant à un mini-jeu de science citoyenne dans le jeu vidéo Borderlands 3 ont aidé à reconstituer l'histoire de l'évolution microbienne des bactéries de l'intestin humain......
Des millions de joueurs du jeu vidéo Borderlands 3 font avancer la recherche biomédicale24 avril 2024Plus de 4 millions de joueurs jouant à un mini-jeu de science citoyenne dans le jeu vidéo Borderlands 3 ont aidé à reconstituer l'histoire de l'évolution microbienne des bactéries de l'intestin humain...... La vieille sonde Voyager 1 de la NASA rétablit la transmission de ses données après 5 mois de charabia24 avril 2024La sonde Voyager 1 a renvoyé des données exploitables pour la première fois depuis plus de 5 mois, ce qui laisse espérer que la mission, vieille de 46 ans, pourra enfin reprendre ses activités normales. La sonde interstellaire préférée de la NASA a transmis samedi au centre de contrôle de la mission des données sur la santé et l'état de ses systèmes embarqués......
La vieille sonde Voyager 1 de la NASA rétablit la transmission de ses données après 5 mois de charabia24 avril 2024La sonde Voyager 1 a renvoyé des données exploitables pour la première fois depuis plus de 5 mois, ce qui laisse espérer que la mission, vieille de 46 ans, pourra enfin reprendre ses activités normales. La sonde interstellaire préférée de la NASA a transmis samedi au centre de contrôle de la mission des données sur la santé et l'état de ses systèmes embarqués......
Ce minuscule robot marcheur est plus petit qu’une tête de fourmis

Ce robot imprimé en 3D ne pèse qu’un milligramme et ne mesure que 2,5 mm. Conçu par Ryan St. Pierre, ingénieur mécanicien et ses collègues de l’université du Maryland (États-Unis), c’est probablement le plus petit robot marcheur au monde.
Comme pour l’image d’entête, le robot de 1 mg, qui fait 2,5 mm x 1,6 mm x 0,7 mm, est présenté avec une tête de fourmi (Paraponera clavata). (Université du Maryland)

Selon Ryan St. Pierre interviewé dans IEEE Spectrum (lien plus bas) :
Comme ses prédécesseurs, ce robot est beaucoup trop petit pour les moteurs ou l’électronique traditionnels. Ses pattes sont contrôlées par des champs magnétiques externes agissant sur de minuscules aimants cubiques encastrés dans les hanches du robot. Les champs magnétiques pivotants font tourner les aimants, entraînant les jambes à des vitesses allant jusqu’à 150 Hz. Avec tous les aimants installés dans les hanches dans la même orientation, vous obtenez une démarche en sauts, mais d’autres allures sont possibles en déplaçant un peu les aimants. La vitesse maximale est de 37,3 mm/s, soit 14,9 longueurs de corps par seconde, et de façon assez surprenante, le robot semble être assez durable, il a été testé pour 1 000 000 de cycles d’actionnement « sans signe d’usure visible ou de performance réduite ».
Vidéo du microbot se déplaçant.
L’étude de faisabilité : “A 3D-printed 1 MG legged microrobot running at 15 body lengths per seconde” a obtenue le premier prix de la Hilton Head Workshop 2018 (Atelier sur les capteurs, actionneurs et microsystèmes à semi-conducteurs/ Île de Hilton-Head – États-Unis) et présentée dans IEEE Spectrum : Four-Legged Walking Robot Is Smaller Than an Ant’s Face.
[totaldonations_circle_bar id="81539"]
Il n'y a pas de publicité ici et le Guru tente, cette semaine, de réunir les fonds nécessaires pour continuer à faire vivre GuruMeditation. On y est presque et votre aide est absolument nécessaire et cela se passe ici.
Derniers Articles
 Le Guru fait une pause dans ses écrits, car il a besoin de votre soutien !7 mai 2024Le Guru lance un appel aux dons afin de l’aider à poursuivre son activité…...
Le Guru fait une pause dans ses écrits, car il a besoin de votre soutien !7 mai 2024Le Guru lance un appel aux dons afin de l’aider à poursuivre son activité…... Un orang-outan est le premier non-humain à soigner des blessures à l’aide d’une plante médicinale4 mai 2024]Un orang-outan sauvage mâle de Sumatra a été observé en train d'appliquer les feuilles mâchées d'une plante aux propriétés médicinales connues sur une plaie de sa joue. Il s'agirait du premier cas documenté de traitement actif d'une plaie par un animal sauvage à l'aide d'une substance végétale biologiquement active connue. Les chercheurs ont observé l'orang-outan, qu'ils ont baptisé Rakus, en juin 2022 dans la zone de recherche de Suaq Balimbing, dans le parc national de......
Un orang-outan est le premier non-humain à soigner des blessures à l’aide d’une plante médicinale4 mai 2024]Un orang-outan sauvage mâle de Sumatra a été observé en train d'appliquer les feuilles mâchées d'une plante aux propriétés médicinales connues sur une plaie de sa joue. Il s'agirait du premier cas documenté de traitement actif d'une plaie par un animal sauvage à l'aide d'une substance végétale biologiquement active connue. Les chercheurs ont observé l'orang-outan, qu'ils ont baptisé Rakus, en juin 2022 dans la zone de recherche de Suaq Balimbing, dans le parc national de...... Des chercheurs reconstituent le visage d’une Néandertalienne à partir d’un crâne écrasé vieux de 75 000 ans4 mai 2024Une équipe de paléo-archéologues est présentée dans un nouveau documentaire dans lequel ces experts ont reconstitué le visage d'une femme néandertalienne ayant vécu il y a 75 000 ans. Le crâne, écrasé en centaines de fragments probablement par un éboulement après la mort, a été déterré en 2018 dans la grotte de Shanidar, au Kurdistan irakien. Baptisés Shanidar Z, les restes du Néandertalien sont peut-être la partie supérieure d'un squelette découvert dans......
Des chercheurs reconstituent le visage d’une Néandertalienne à partir d’un crâne écrasé vieux de 75 000 ans4 mai 2024Une équipe de paléo-archéologues est présentée dans un nouveau documentaire dans lequel ces experts ont reconstitué le visage d'une femme néandertalienne ayant vécu il y a 75 000 ans. Le crâne, écrasé en centaines de fragments probablement par un éboulement après la mort, a été déterré en 2018 dans la grotte de Shanidar, au Kurdistan irakien. Baptisés Shanidar Z, les restes du Néandertalien sont peut-être la partie supérieure d'un squelette découvert dans......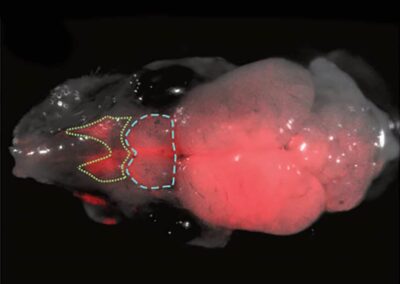 Des scientifiques créent des cerveaux hybrides souris-rat avec des neurones des deux espèces4 mai 2024Des chercheurs américains ont utilisé une technique spéciale pour éliminer les neurones de souris en développement, qu'ils ont remplacés par des cellules souches de rat. Ces cellules se sont transformées en neurones de rat dans le cerveau de la souris, qui est AINSI devenu un cerveau hybride. Chose remarquable, les rongeurs modifiés sont en bonne santé et se comportent normalement, ce qui est très prometteur pour les thérapies régénératives neuronales. Les recherches ont été menées par deux équipes indépendantes, qui ont publié leurs résultats......
Des scientifiques créent des cerveaux hybrides souris-rat avec des neurones des deux espèces4 mai 2024Des chercheurs américains ont utilisé une technique spéciale pour éliminer les neurones de souris en développement, qu'ils ont remplacés par des cellules souches de rat. Ces cellules se sont transformées en neurones de rat dans le cerveau de la souris, qui est AINSI devenu un cerveau hybride. Chose remarquable, les rongeurs modifiés sont en bonne santé et se comportent normalement, ce qui est très prometteur pour les thérapies régénératives neuronales. Les recherches ont été menées par deux équipes indépendantes, qui ont publié leurs résultats......