Dernières Brèves
 La voile solaire avancée de la NASA s’est déployée sans encombre dans l’espace26 avril 2024La NASA a lancé son système de voile solaire composite avancé (Advanced Solar Sail) à bord d'une fusée Electron de RocketLab, déployant ainsi une voile de 9 mètres en orbite terrestre basse......
La voile solaire avancée de la NASA s’est déployée sans encombre dans l’espace26 avril 2024La NASA a lancé son système de voile solaire composite avancé (Advanced Solar Sail) à bord d'une fusée Electron de RocketLab, déployant ainsi une voile de 9 mètres en orbite terrestre basse...... Des millions de joueurs du jeu vidéo Borderlands 3 font avancer la recherche biomédicale24 avril 2024Plus de 4 millions de joueurs jouant à un mini-jeu de science citoyenne dans le jeu vidéo Borderlands 3 ont aidé à reconstituer l'histoire de l'évolution microbienne des bactéries de l'intestin humain......
Des millions de joueurs du jeu vidéo Borderlands 3 font avancer la recherche biomédicale24 avril 2024Plus de 4 millions de joueurs jouant à un mini-jeu de science citoyenne dans le jeu vidéo Borderlands 3 ont aidé à reconstituer l'histoire de l'évolution microbienne des bactéries de l'intestin humain...... La vieille sonde Voyager 1 de la NASA rétablit la transmission de ses données après 5 mois de charabia24 avril 2024La sonde Voyager 1 a renvoyé des données exploitables pour la première fois depuis plus de 5 mois, ce qui laisse espérer que la mission, vieille de 46 ans, pourra enfin reprendre ses activités normales. La sonde interstellaire préférée de la NASA a transmis samedi au centre de contrôle de la mission des données sur la santé et l'état de ses systèmes embarqués......
La vieille sonde Voyager 1 de la NASA rétablit la transmission de ses données après 5 mois de charabia24 avril 2024La sonde Voyager 1 a renvoyé des données exploitables pour la première fois depuis plus de 5 mois, ce qui laisse espérer que la mission, vieille de 46 ans, pourra enfin reprendre ses activités normales. La sonde interstellaire préférée de la NASA a transmis samedi au centre de contrôle de la mission des données sur la santé et l'état de ses systèmes embarqués...... Photos : Lorsque deux satellites dans des directions opposées se croisent dans l’espace à 10 000 km/h13 avril 2024La sonde Lunar Reconnaissance Orbiter (LRO) de la NASA a pris une photo parfaitement synchronisée lorsqu'elle a croisé le chemin d'un autre engin spatial en orbite autour de la lune. La sonde LRO, qui est en orbite autour de la lune depuis 15 ans, a pris plusieurs images de l'orbiteur lunaire Danuri de l'Institut de recherche aérospatiale de Corée, alors que les deux engins spatiaux, voyageant sur des orbites presque parallèles, se sont croisés dans des directions opposées au cours de trois orbites entre le 5 et le 6 mars......
Photos : Lorsque deux satellites dans des directions opposées se croisent dans l’espace à 10 000 km/h13 avril 2024La sonde Lunar Reconnaissance Orbiter (LRO) de la NASA a pris une photo parfaitement synchronisée lorsqu'elle a croisé le chemin d'un autre engin spatial en orbite autour de la lune. La sonde LRO, qui est en orbite autour de la lune depuis 15 ans, a pris plusieurs images de l'orbiteur lunaire Danuri de l'Institut de recherche aérospatiale de Corée, alors que les deux engins spatiaux, voyageant sur des orbites presque parallèles, se sont croisés dans des directions opposées au cours de trois orbites entre le 5 et le 6 mars......
Un robot pour aider les humains à s’habiller

Il existe de nombreuses activités que nous considérons pour la plupart comme allant de soi et que nous effectuons tous les jours. Des tâches comme s’habiller sont faciles pour la plupart des humains, mais pour les personnes souffrant de divers handicaps, s’habiller peut représenter un véritable défi. Des chercheurs du monde entier travaillent à la mise au point de robots capables d’aider les personnes dans les activités de la vie quotidienne, comme s’habiller et manger.
Les chercheurs du Computer Science & Artificial Intelligence Lab (CSAIL) du Massachusetts Institute of Technology (MIT) développent des robots qui travaillent avec les humains pour les aider à s’habiller, par exemple. La difficulté réside dans le fait que les robots n’ont pas la conscience comportementale et le contrôle dont disposent les humains, de sorte que leur bonne collaboration avec les personnes nécessite de la planification et de la coordination. Par exemple, un assistant humain peut faire des choses comme verser une tasse de café sans en renverser, mais un robot peut avoir du mal à accomplir cette tâche simple. Les chercheurs du MIT ont créé un nouvel algorithme pour aider un robot à trouver des plans de mouvement efficaces afin de garantir la sécurité physique de tout humain avec lequel il travaille.
Le robot que l’équipe a conçu aide les gens à enfiler une veste, ce qui est une tâche simple mais qui pourrait être utile pour aider les utilisateurs handicapés ou à mobilité réduite. L’algorithme a été mis au point pour éviter de blesser la personne sans nuire inutilement à l’efficacité de la tâche effectuée par le robot. L’algorithme permet au robot d’entrer en contact avec les humains sans les blesser, de sorte qu’il puisse trouver des trajectoires efficaces pour s’adresser à l’humain avec une garantie de sécurité.
Pour que l’algorithme fonctionne, il faut une modélisation correcte de l’humain, c’est-à-dire de la façon dont il se déplace, réagit et répond. La modélisation humaine est nécessaire pour permettre une planification réussie du mouvement du robot dans une tâche interactive entre l’homme et le robot. Les robots peuvent interagir de manière fluide si le modèle humain est parfait, mais le problème est qu’il n’existe pas de modèle parfait. Plutôt que d’avoir un seul modèle par défaut où le robot ne comprend qu’une seule réaction potentielle, l’équipe pourrait donner à la machine la capacité de réaliser plusieurs modèles potentiels.
Cela permet au robot d’imiter de près la façon dont les humains peuvent appréhender d’autres humains. Le robot est également capable de recueillir davantage de données pour réduire son incertitude et affiner ses propres modèles. L’équipe sait qu’il n’est pas possible d’éviter les chocs avec une personne que le robot tente d’aider. Elle lui permet donc d’établir un contact non préjudiciable, ce qui permet au robot d’habiller la personne en moins de temps.
L’étude publiée dans Robotics Proceedings (PDF) : Provably Safe and Efficient Motion Planning with Uncertain Human Dynamics et présentée sur le site du MIT Computer Science & Artificial Intelligence Lab : Getting dressed with help from robots.
Il y a actuellement un appel aux dons pour la survie de GuruMeditation. Vous pouvez consulter la note du Guru à ce sujet…
…ou bien participer directement avec l’icône ci-dessous. Merci pour votre aide !
Derniers Articles
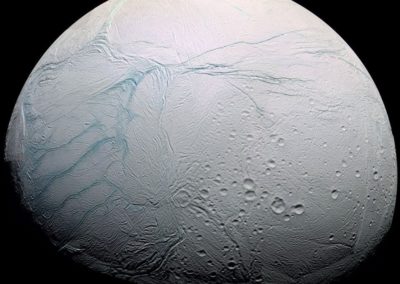 Les “rayures de tigre” de la lune de Saturne, Encelade, sont liées à ses spectaculaires geysers2 mai 2024Les mouvements des lignes de faille de la croûte gelée d'Encelade, une des lunes de Saturne, pourraient être à l'origine des panaches de matière glacée qui s'échappent du ventre aqueux de la lune, selon une équipe de chercheurs qui a récemment modélisé ces mouvements. L'étude de l'équipe s'est concentrée sur les “rayures de tigre” d'Encelade, de longues fissures situées principalement dans les parties méridionales de la lune, que certains pensent avoir été causées par un ancien impact. D'autres chercheurs ont......
Les “rayures de tigre” de la lune de Saturne, Encelade, sont liées à ses spectaculaires geysers2 mai 2024Les mouvements des lignes de faille de la croûte gelée d'Encelade, une des lunes de Saturne, pourraient être à l'origine des panaches de matière glacée qui s'échappent du ventre aqueux de la lune, selon une équipe de chercheurs qui a récemment modélisé ces mouvements. L'étude de l'équipe s'est concentrée sur les “rayures de tigre” d'Encelade, de longues fissures situées principalement dans les parties méridionales de la lune, que certains pensent avoir été causées par un ancien impact. D'autres chercheurs ont...... Plus de 90 % des oiseaux polaires sont contaminés par des microplastiques2 mai 2024Le plastique est pratiquement partout sur Terre. De la plus haute montagne aux plus grandes profondeurs des océans, des régions polaires à l'intérieur de notre corps, il n'y a plus moyen d'y échapper. Bien que la pollution plastique soit loin d'être un nouveau problème, l'ampleur de la pollution par les microplastiques n'est apparue que récemment. La pollution plastique est généralement divisée en macroplastiques (>5 cm), microplastiques (0,1 µm-5 mm) et nanoplastiques (<0,1 µm). Plus le plastique est......
Plus de 90 % des oiseaux polaires sont contaminés par des microplastiques2 mai 2024Le plastique est pratiquement partout sur Terre. De la plus haute montagne aux plus grandes profondeurs des océans, des régions polaires à l'intérieur de notre corps, il n'y a plus moyen d'y échapper. Bien que la pollution plastique soit loin d'être un nouveau problème, l'ampleur de la pollution par les microplastiques n'est apparue que récemment. La pollution plastique est généralement divisée en macroplastiques (>5 cm), microplastiques (0,1 µm-5 mm) et nanoplastiques (<0,1 µm). Plus le plastique est...... Des scientifiques trouvent un moyen de convertir les groupes sanguins et de les rendre mutuellement compatibles pour la transfusion2 mai 2024Les transfusions sanguines sauvent souvent la vie des patients qui ont désespérément besoin de remplacer leur sang perdu à la suite d'une intervention chirurgicale ou d'une blessure. Le problème est que les réserves de sang sont faibles dans le monde entier. Pour ne rien arranger, il existe plusieurs groupes sanguins, dont certains sont incompatibles. Par exemple, si votre groupe sanguin est O négatif, vous ne pouvez recevoir que du sang de type O négatif......
Des scientifiques trouvent un moyen de convertir les groupes sanguins et de les rendre mutuellement compatibles pour la transfusion2 mai 2024Les transfusions sanguines sauvent souvent la vie des patients qui ont désespérément besoin de remplacer leur sang perdu à la suite d'une intervention chirurgicale ou d'une blessure. Le problème est que les réserves de sang sont faibles dans le monde entier. Pour ne rien arranger, il existe plusieurs groupes sanguins, dont certains sont incompatibles. Par exemple, si votre groupe sanguin est O négatif, vous ne pouvez recevoir que du sang de type O négatif...... Le télescope spatial James Webb capture les meilleures images de la nébuleuse de la tête de cheval2 mai 2024L'une des plus célèbres structures du ciel terrestre vient d'être révélée sous un jour tout à fait nouveau. Les observations dans l'infrarouge moyen et proche du télescope spatial James Webb (JWST/ Webb) ont mis en évidence des caractéristiques inédites dans le nuage spatial connu sous le nom de nébuleuse de la tête de cheval. Dans une image d'une précision époustouflante, le télescope spatial se concentre sur la région située au sommet de la tête du “cheval”, capturant des vrilles et des filaments......
Le télescope spatial James Webb capture les meilleures images de la nébuleuse de la tête de cheval2 mai 2024L'une des plus célèbres structures du ciel terrestre vient d'être révélée sous un jour tout à fait nouveau. Les observations dans l'infrarouge moyen et proche du télescope spatial James Webb (JWST/ Webb) ont mis en évidence des caractéristiques inédites dans le nuage spatial connu sous le nom de nébuleuse de la tête de cheval. Dans une image d'une précision époustouflante, le télescope spatial se concentre sur la région située au sommet de la tête du “cheval”, capturant des vrilles et des filaments......
Il existe de nombreuses activités que nous considérons pour la plupart comme allant de soi et que nous effectuons tous les jours. Des tâches comme s’habiller sont faciles pour la plupart des humains, mais pour les personnes souffrant de divers handicaps, s’habiller peut représenter un véritable défi. Des chercheurs du monde entier travaillent à la mise au point de robots capables d’aider les personnes dans les activités de la vie quotidienne, comme s’habiller et manger.
Les chercheurs du Computer Science & Artificial Intelligence Lab (CSAIL) du Massachusetts Institute of Technology (MIT) développent des robots qui travaillent avec les humains pour les aider à s’habiller, par exemple. La difficulté réside dans le fait que les robots n’ont pas la conscience comportementale et le contrôle dont disposent les humains, de sorte que leur bonne collaboration avec les personnes nécessite de la planification et de la coordination. Par exemple, un assistant humain peut faire des choses comme verser une tasse de café sans en renverser, mais un robot peut avoir du mal à accomplir cette tâche simple. Les chercheurs du MIT ont créé un nouvel algorithme pour aider un robot à trouver des plans de mouvement efficaces afin de garantir la sécurité physique de tout humain avec lequel il travaille.
Le robot que l’équipe a conçu aide les gens à enfiler une veste, ce qui est une tâche simple mais qui pourrait être utile pour aider les utilisateurs handicapés ou à mobilité réduite. L’algorithme a été mis au point pour éviter de blesser la personne sans nuire inutilement à l’efficacité de la tâche effectuée par le robot. L’algorithme permet au robot d’entrer en contact avec les humains sans les blesser, de sorte qu’il puisse trouver des trajectoires efficaces pour s’adresser à l’humain avec une garantie de sécurité.
Pour que l’algorithme fonctionne, il faut une modélisation correcte de l’humain, c’est-à-dire de la façon dont il se déplace, réagit et répond. La modélisation humaine est nécessaire pour permettre une planification réussie du mouvement du robot dans une tâche interactive entre l’homme et le robot. Les robots peuvent interagir de manière fluide si le modèle humain est parfait, mais le problème est qu’il n’existe pas de modèle parfait. Plutôt que d’avoir un seul modèle par défaut où le robot ne comprend qu’une seule réaction potentielle, l’équipe pourrait donner à la machine la capacité de réaliser plusieurs modèles potentiels.
Cela permet au robot d’imiter de près la façon dont les humains peuvent appréhender d’autres humains. Le robot est également capable de recueillir davantage de données pour réduire son incertitude et affiner ses propres modèles. L’équipe sait qu’il n’est pas possible d’éviter les chocs avec une personne que le robot tente d’aider. Elle lui permet donc d’établir un contact non préjudiciable, ce qui permet au robot d’habiller la personne en moins de temps.
L’étude publiée dans Robotics Proceedings (PDF) : Provably Safe and Efficient Motion Planning with Uncertain Human Dynamics et présentée sur le site du MIT Computer Science & Artificial Intelligence Lab : Getting dressed with help from robots.
Il y a actuellement un appel aux dons pour la survie de GuruMeditation. Vous pouvez consulter la note du Guru à ce sujet…
https://www.gurumed.org/2021/06/01/gurumeditation-bientt-en-pause-pour-son-appel-aux-dons-le-guru-a-besoin-de-vous/